


Curated by Kathy Cleland
An exhibition for ISEA2011
Cumhuriyet Art Gallery, Istanbul
14 September – 7 October, 2011
Catalogue available at http://www.leoalmanac.org/vol-18-no-5-isea2011-istanbul-uncontainable/Â – see Signs of Life: Robot Incubator (pp.236-255)
Unlike humans, robots aren’t born biologically. They are designed, built, programmed and incubated by their human parents in a variety of different birthing environments including robotics laboratories, artists’ studios and hobbyists’ back sheds.
The robot children that emerge from these environments are a morphologically and behaviourally diverse species. Some robots are purely ‘machinic’ in appearance and behaviour but many display bio-mimetic and anthropomorphic characteristics. Although robots are made and not born, they can display such persuasive ‘signs of life’ that their human audiences respond to them as if they were living, sentient beings with their own agency, beliefs, desires and intentions. Some robots scuttle and swarm like insects. Others may mimic the appearance and behaviour of birds, fish and animals or take on human form and human-like characteristics.
As products of mimesis and simulation, robots also have a shared lineage with other human artefacts including dolls, puppets, sculptures, figurines and automaton. As with these earlier cultural artefacts, robots mimic and simulate aspects and characteristics of living organisms. As our robotic machines become increasingly lively, sensate and intelligent, they make us reflect on big philosophical questions:Â Can machines be intelligent? How do they see and experience the world around them? Do they have desires? Intentions? Agency? What kinds of relationships will they have with their human creators?
In the Signs of Life: Robot Incubator exhibition there are robots that look like machines but display human-like psychological behaviours and phobias, a humanoid robot that looks like a sculpture come to life, a doll-like robotic automaton performer, and interactive modular robots that display hybrid machinic/biomorphic characteristics. The robotic ‘signs of life’ shown by the robots in the exhibition include autonomous movement, responsiveness to the environment and interaction with audience participants.
The robots in the exhibition are being shown at different stages in their development, from design to prototype to full development. This will be the first public viewing for Mari Velonaki’s new humanoid robot Diamandini which is in the second year of its five year development in a research collaboration by the artist and robotics scientists at the Centre for Social Robotics, Australian Centre for Field Robotics, the University of Sydney. John Tonkin’s small machinic robots, which will display a variety of nervous dysfunctions, are also being shown in their first incarnation along with new versions of Kirsty Boyle’s interactive modular fragment robots. The final robot in the exhibition is Kirsty Boyle’s Tree Ceremony robot. This robot is inspired by Japanese karakuri (Japanese automaton or mechanised puppets from the 17th-19th century) and performs a ‘tree ceremony’ ritual for the audience. The Tree Ceremony robot is a seasoned performer as it has already been exhibited in two previous exhibitions.However, even fully developed and ‘completed’ robotic artworks such as this one can still be tweaked, changed, re-programmed and exhibited in different performative settings so that we will be seeing unique performance at the Signs of Life exhibition.
Artworks in the Exhibition
Mari Velonaki – Diamandini (2011-2013)

Mari Velonaki, Diamandini (2011), interactive robotic installation, dimensions variable
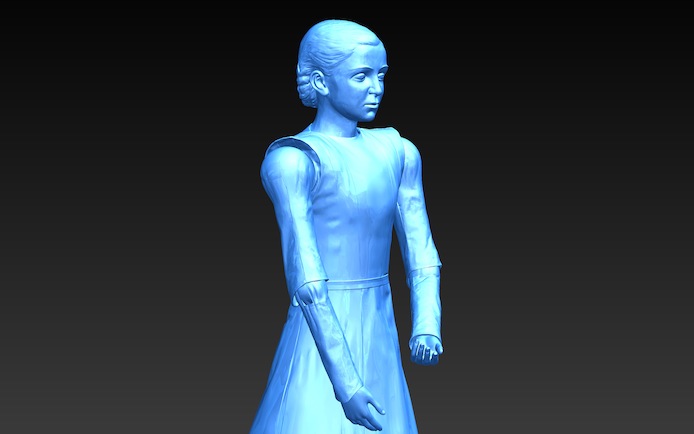
Diamandini is a 155cm tall custom-made humanoid robot incorporating an omni-directional wheeled motion platform; cameras, laser scanners and computers for real-time tracking and installation control. The humanoid robot is being developed through a five year research project between Mari Velonaki and robotics scientists at the Centre for Social Robotics, Australian Centre for Field Robotics, the University of Sydney. Diamandini will be making her first exhibition appearance in the Signs of Life exhibition as a work in progress.
Spectators enter an installation space where a kinetic sculpture is moving about in a smooth, choreographed manner. The kinetic sculpture is a robot that resembles a small-scale female figure that does not bear any elements that would classify her as a typical android robot. The texture that covers the robot from her head to the hem of her long dress is porcelain-like, and makes her look more like a floating figurine rather than a robot. Her movement is accompanied by soundscapes generated from within her. When a spectator approaches the figurine she responds physically by turning towards the person and gently moving closer to them.
This project aims to investigate intimate human-robot interactions in order to develop an understanding of the physicality that is possible and acceptable between a human and a robot. ‘Diamandini’ is an interactive autokinetic artwork that investigates the dialogical possibilities between a robot, in the form of female figurine, that can communicate with her audience through the modalities of movement and (at a later stage) written text. Spectators entering the installation space attract the attention of the robot; dialogues occur kinetically through the robot’s ‘perception’ of the body language of the participant, and as the participant reacts to the ‘body language’ of the robot.
Credits:
Original Concept: Artist/Interface Design: mari velonaki
Robotic Systems Design: David Rye
Mechanical and Electronic Design: Mark Calleija
Lead Programer: Cedric Wohlleber
Mechanical Fabrication: Bruce Crundwell
Supported by: Australia Research Council and Centre for Social Robotics/ Australian Centre for Field Robotics, The University of Sydney.
John Tonkin – nervous robots (2011)

John Tonkin, nervous robots (2011),  custom electronics/software
These robots are from John Tonkin’s nervous robots series. He is interested in how cybernetics has been used to construct computational models of different mental processes. Using a language of feedback loops and homeostatic control systems these models seek to describe the (mis)workings of the human mind. His dysfunctional robots will explore some of these computational models of mind, awkwardly hybridising bottom-up AI approaches with more classical symbolic approaches that draw from a folk psychology conception of the mind as being the home of internal mental processes such as motives, desires, phobias and neuroses.
attached/detached consists of two small autonomous robots that go through an ever shifting interplay of neediness and dismissiveness; with occasional moments of mutual happiness. These robots are primarily focussed on seeking or avoiding each other and will be oblivious to the audience. They draw on research by John Bowlby and Mary Ainsworth into attachment styles in adult romantic relationships. These different styles (secure, anxious-preoccupied, dismissive-avoidant and fearful-avoidant) corresponded to different combinations of a person’s attitudes (positive or negative) towards themself and towards their partner.
Kirsty Boyle – tree ceremony (2010)

Kirsty Boyle, tree ceremony (2010), installation of multiple parts, variable dimensions
- Tree ceremony involves a robot interacting with a tree, creating an environment exploring how technology might bring us closer to nature. The work was commissioned by the Tinguely Museum and the Kunsthaus Graz for the touring ‘Robot Dreams’ exhibition, and comes direct to Istanbul from the ‘Puppen – Projectionsfiguren in der Kunst’ exhibition at museum villa rot in Germany.
Kirsty Boyle – fragment robots (2009-2011)

Kirsty Boyle, fragment (2010), cardboard and electronics, variable dimensions
Fragment is a series of interactive modular robots, handcrafted in a range of different materials. During the Signs of Life exhibition a new series of robots will be developed that explore a range of differing aesthetic and gestural representations of artificial life manifested as performance machines.
Biographies
Kathy Cleland (curator)
Kathy Cleland is an Australian-based curator, writer and researcher specialising in new media art and digital culture. She is Director of the Digital Cultures Program at The University of Sydney, an innovative cross-disciplinary program that critically investigates the social and cultural impacts of new digital media technologies. Her curatorial projects include the Cyber Cultures exhibition series which toured to over 20 venues in Australia and New Zealand (2000–2003), the Mirror States exhibition (2008) at MIC Toi Rerehiko, Auckland, NZ and Campbelltown Arts Centre, Sydney, and Face to Face: portraiture in a digital age for d/Lux/MediaArts, a digital portraiture exhibition currently touring Australia and Asia (2008-2011). Kathy is a founding member the Robot Cultures research initiative set up by the Digital Cultures Program and the Centre for Social Robotics Centre at the University of Sydney (www.robotcultures.org). She is on the Organising Committee and is Chair of the Curatorial Committee for ISEA2013 in Sydney. http://www.kathycleland.com
Mari Velonaki (artist)
Mari Velonaki is a media artist and researcher who has worked in the field of interactive installation art since 1995. Her practice engages the spectator/participant with digital and robotic “characters†in interplays stimulated by sensory triggered interfaces. Her innovative human-machine interfaces promote intimate and immersive relationships between participants and interactive artworks. She was awarded a PhD in Media Arts at the College of Fine Arts, University of New South Wales in 2003. Since 2003, Mari has been working as a senior researcher at the Australian Centre for Field Robotics. In 2006 she co-founded with David Rye the Centre for Social Robotics within the Australian Centre for Field Robotics at the University of Sydney. In 2007 Mari was awarded an Australia Council for the Arts Visual Arts Fellowship in recognition of her body of work. In 2009 she was awarded a prestigious Australian Research Council Queen Elizabeth II Fellowship (2009-2013) for the creation of a new robot. This research that investigates human-robot interactions in order to develop an understanding of the physicality that is possible between a human and a robot. Mari’s media art installations have been exhibited in museums and festivals worldwide.
John Tonkin (artist)
John Tonkin is a Sydney based media artist who began working with new media in 1985. In 1999-2000 he received a fellowship from the Australia Council’s New Media Arts Board. His work explores interactivity as a site for physical and mental play. Recent projects have used real-time 3d animation, visualisation and data-mapping technologies and custom built and programmed electronics. His works have often involved building frameworks / tools / toys within which the artwork is formed through the accumulated interactions of its users. John currently lectures within the Digital Cultures Program, at the University of Sydney and is undertaking a practice based PhD at COFA, UNSW. His current research is around cybernetics, embodied cognition and situated perception. He is building a number of nervous robots that embody computational models of mind and responsive environments that form a kind of dynamically coupled enactive perceptual apparatus.
Kirsty Boyle (artist)
Kirsty Boyle is an Australian artist whose passion for robots has driven her to travel the world in order to work with other like-minded artists and scientists. The historical and cultural aspects of science in society continue to be a major theme that informs her artistic practice. Her most recent body of work examines robots as subjects of culture with particular emphasis on how we experience and personalise our interactions with them. During 2002, Kirsty began study under Mr Tamaya Shobei, a ninth generation Karakuri Ningyo craftsman and last remaining mechanical doll Master in Japan. She is currently his only student, and the only woman to have ever been trained in the tradition. In 2010 she produced Tree Ceremony, commissioned by the Museum Tinguely and Kunsthaus Graz for the Robot Dreams exhibition, touring 2010 – 2011. Her art portfolio can be viewed online via http://www.onnai.com
This project has been assisted by the Australian Government through the Australia Council for the Arts, its arts funding and advisory body.
